Bild: Kimball Hall
Räddad av en robot
I farliga och otillgängliga miljöer kan robotar sköta räddningsuppdrag som människor inte klarar av. Några av de mest banbrytande modellerna utformas med inspiration från djurvärlden och dataspel.
Det är en råkall morgon i mitten av januari. På stranden står personal från grekiska Röda korset tillsammans med volontärer i lysande gula västar. Några packar beslutsamt upp värmefiltar som prasslar och fladdrar i vinden, andra trampar lite otåligt vid sidan av. Alla spanar ut mot havet.
En överlastad gummibåt närmar sig långsamt. Ett femtiotal människor – män, kvinnor och barn – sitter tätt hopträngda, helt stilla i båten. De är dubbelt så många som båten egentligen kan ta för att vara sjöduglig. Pontonerna bågnar men båten har ändå lyckats hålla sig både flytande och i rörelse nästan hela vägen från Turkiet. Snart är den framme vid den grekiska ön Lesbos.
Gummibåten eskorteras av två räddningsbåtar, men när det fortfarande är en bra bit kvar till stranden stannar de upp och låter båten med flyktingar fortsätta på egen hand. Det är för grunt. Samtidigt är det så pass djupt att räddningspersonalen på stranden måste simma ut om båten kapsejsar.
Gummibåten har kommit in i det som räddningspersonalen kallar för the gap, den sista sträckan innan den når land, den som blir särskilt farlig i mörker och hårt väder. För ett par veckor sedan drunknade trettiosju människor när deras rangliga båt sjönk utanför Lesbos. De var då femtio meter från land.
Den här dagen är havet stilla, men räddningspersonalen står ändå allvarligt avvaktande medan gummibåten långsamt fortsätter över the gap. Då dyker en märklig liten farkost upp och gör en försiktig gir vid gummibåten. Det är räddningsroboten Emily.
Emily är i princip en fjärrstyrd livboj med inbyggd kamera och jetdrift. Om det värsta händer och panikslagna människor hamnar i vattnet, kan upp till fem av dem samtidigt grabba tag i Emily och bli bogserade i säkerhet. Räddningspersonalen kan fokusera på att rädda barn och de mest utmattade och medtagna, medan roboten återvänder och hämtar fler nödställda i vattnet.
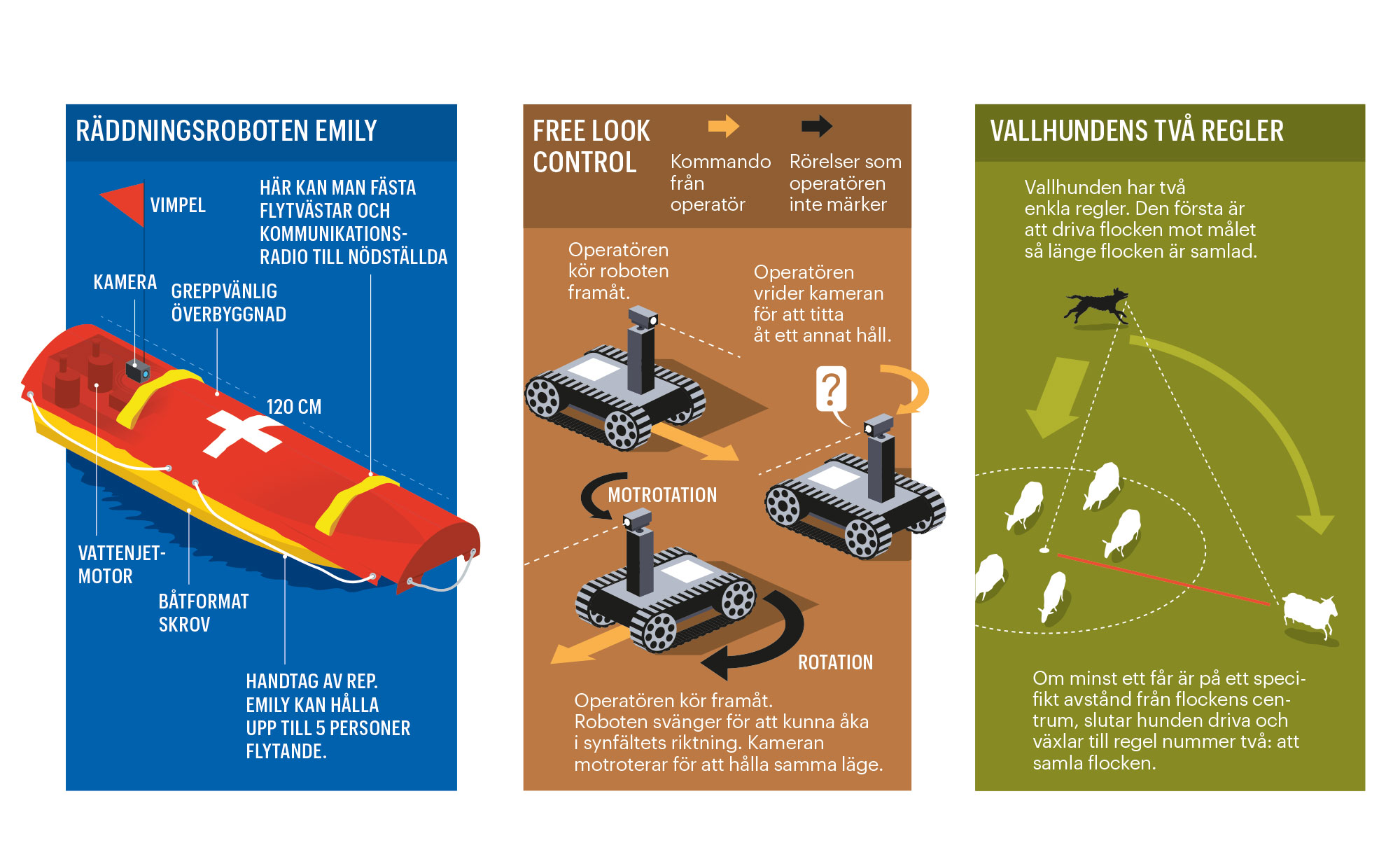
Tuff livräddare i besvärliga vatten Roboten Emily är i princip en fjärrstyrd livboj, byggd för att klara starka vattenströmmar och hög sjö – vilket gör den särskilt lämpad att undsätta människor i den farliga zonen nära land. Den är utrustad med värmekamera, har en toppfart på 18 knop och drivs med vattenjet för att undvika kroppsskador. Flytkraften räcker för fem personer. Ursprungsmodellen användes av biologer för att studera marina däggdjur.
Som dataspel – fast på riktigt Räddningsrobotar kan skickas in i katastrofområden för att så snabbt som möjligt skaffa en lägesbild åt räddningspersonal. Hur stor är rasrisken? Var finns skadade? Genom att utgå från dataspelsvärldens free look control kan räddningsrobotar nu styras enklare och mer intuitivt av operatörerna. Framåt betyder alltid framåt i kamerans riktning, och det nödvändiga roterandet av robotens chassi och kamera sker automatiskt.
Hundens knep hjälper roboten Arbetande vallhundar ser mest ut att svepa energiskt bakom får som ska vallas. Men nu finns en teoretisk modell för hur en ensam vallhund kan kontrollera och styra åttio motvilliga får. Modellens algoritmer skulle kunna utvecklas i robotar för att användas vid evakueringar och för att kontrollera autonoma robotsvärmar vid miljökatastrofer.
Bild: Johan Jarnestad
Havet är fortsatt lugnt när gummibåten fortsätter närma sig, nu med Emily som stand-by i kölvattnet. Till slut är den så nära att räddningspersonalen kan vada ut och hjälpa människorna i land. På ostadiga ben lämnar de både gummibåten och den farliga överfarten bakom sig. Räddningspersonalen sveper in huttrande barn i värmefiltar medan Emily-roboten görs redo för att möta ännu en båt på väg in.
Tony Mulligan är ingenjören som både har konstruerat Emily-roboten och donerat två stycken till den grekiska kustbevakningen. Att det alls finns en räddningsrobot av det här slaget beror på en idé som Tony Mulligan fick när han för sju år sedan arbetade med maritima robotar för amerikanska NOOA (National oceanic and atmospheric administration).
Uppdraget var då att ta fram en robust och stabil robot som kunde användas i tuff sjögång nära land. NOAA behövde en ytgående robot för fotografering och monitoring av sälar och andra marina däggdjur på otillgängliga platser i marina nationalparker. När Tony Mulligan såg hur effektivt hans nya robot kunde manövreras i höga vågor och bränningar, dök tanken upp på att använda den för livräddning hemma vid stranden i Malibu.
Varje år drunknar badande människor vid amerikanska stränder. En av de farligaste situationerna är när det plötsligt uppstår starka undervattensströmmar nära land. Vid populära stränder som Zuma beach och Venice beach finns erfarna livräddare redo att kasta sig i vattnet och undsätta människor, men i vissa lägen kan det uppdraget bli både svårt och farligt – särskilt när flera människor samtidigt fastnar i strömmar som drar dem ut till havs. Där skulle en liten och snabb robot kunna hjälpa till.
Det tog bara några månader att bygga om roboten och få klart en första prototyp av livräddningsroboten Emily. Den blev så behändig att en person enkelt kunde bära ner den till vattnet och kasta ut den i vågorna. Där vände den sig direkt på rätt köl, forcerade vågorna utan problem och kunde sedan dra i väg med en hastighet på upp till 18 knop – ut till människor som kunde hänga på den i väntan på att bli bärgade.
Senare modeller av Emily har även utrustats med värmekameror för att kunna hitta människor i mörker. För att kunna fungera effektivare i de extrema lägen som kan uppstå med flyktingbåtar på Medelhavet försöker man nu också göra roboten mer autonom. Information från värmekameran skulle kunna guida roboten till att själv placera sig optimalt i en nödsituation.
Det gäller allt från sälar till människor i sjönöd. När räddningsroboten väl finns är den nästan ett självklart exempel på teknikutveckling. Men likväl måste idén först uppstå, och det momentet är inte lika självklart.
Det finns två svenska forskare som också har använt sig av oväntade och smarta idéer när det gäller att utveckla räddningsrobotar.
Petter Ögren är universitetslektor på Avdelningen för datorseende och robotik vid Kungliga tekniska högskolan i Stockholm. Han deltar i det europeiska forskningsprojektet TRADR för att utveckla markrobotar som kan användas av brandmän och annan räddningspersonal. Vid ett plötsligt infall hemma i vardagsrummet i Sundbyberg kom Petter Ögren på ett helt nytt sätt att styra räddningsrobotar. Det handlade om att utgå från något som miljoner människor använder sig av dagligen: dataspel.
– Räddningsrobotar är oftast fjärrstyrda eftersom de används i farliga miljöer där det brinner och byggnader riskerar att rasa, förklarar Petter Ögren. För att kunna fjärrstyra roboten är det viktigt att operatören har en bra lägesbild, att det går att se och förstå vad som händer, och det kan vara svårt. Det är här som vår forskning är ett steg åt rätt håll.
Petter Ögren menar att det finns flera paralleller mellan dataspel och räddningsrobotar, inte minst när det gäller sättet att lösa ett uppdrag på, genom att via spakar och en skärm styra en entitet i en 3D-miljö.
I dataspel rör man sig i en virtuell miljö, smyger runt och undviker farligheter, skjuter ner skurkar och löser uppgifter under stress. För roboten kan uppdragen vara att söka genom en byggnad, hitta skadade och förstå var det brinner – och det är ofta bråttom.
Hur bra spelupplevelsen är hänger på gränssnittet.
– Gränssnittet är en väldigt stor del av upplevelsen när man spelar dataspel. Är upplevelsen dålig vill ingen spela, och datavärldsindustrin omsätter bisarrt mycket pengar. Därför har man lagt mycket krut på gränssnittet och lärt sig vad som är bra och inte bra.
Inom räddningsrobotik har man inte alls ägnat sig lika mycket åt detta. Det har varit mer fokus på att göra det möjligt för roboten att lösa uppgiften. Går det att styra fram roboten och demolera den misstänkta bomben på ett säkert sätt, är man nöjd. Man har använt ett väldigt enkelt gränssnitt; det har löst uppgiften och därför har man fortsatt att använda det.
Hur fungerar det då? Det klassiska sättet att styra en robot kallas tank control, där en spak styr larvbanden på roboten och en spak styr kameramotorn. Men att manuellt sköta styrning av både robot och kamera kräver rätt mycket av operatören.
Petter Ögren har i stället vidareutvecklat det sätt som finns i dagens dataspel och som kallas free look control. Också här används två spakar att styra med, men skillnaden är att alla rörelsekommandon tolkas relativt kamerariktningen. Framåt betyder alltid framåt i kamerans riktning. Roterandet av både larvband och kamera sker automatiskt i det nya styrsystemet, och operatören behöver inte hålla reda på vilken riktning roboten intar eller hur mycket kameran måste motroteras för att hänga med i svängarna.
– Det är som i dataspelen, där det ofta handlar om att simulera en person som rör sig till fots.
Den som spelar dataspel har säkert lätt att förstå fördelarna. Upplevelsen av att vara närvarande – att vara där utan att vara där – och direkt kunna röra sig i förhållande till allt som dyker upp i synfältet, underlättar det som kallas för situation awareness. Just det är avgörande vid styrning av räddningsrobotar som används vid katastrofer där omgivningen är oförutsägbar och tiden knapp.
Dataspelsbranschen är ju en miljardindustri – enbart spelserien Call of duty har sålts i över 190 miljoner exemplar. Är inte deras lösningar hemliga?
– De försöker nog hålla på så mycket som de bara kan, men i det här fallet behöver man bara använda spelet för att se hur gränssnittet funkar.
Petter Ögren har testat sin prototyp tillsammans med räddningspersonal och kan föreställa sig att den inom tio år finns som standard på större brandstationer. Han menar att det finns två bra anledningar till att systemet med dataspelsgränssnitt är bra för räddningsrobotar.
– Vid det här laget finns miljontals både ungdomar och medelålders som är vana att spela dataspel. I stället för att folk ska gå på kurs kan man fråga om de har spelat Call of duty, för det funkar på samma sätt. Och så är gränssnittet i sig bra, oavsett hur många som redan kan det. Det finns en anledning till att dataspelsföretagen valde det innan det blev branschstandard.
Att jobba med den här typen av robotar, det måste väl innebära att beakta alla möjliga extrema miljöer som de ska fungera i?
– Ofta tänker man sig scenarier där det har rasat en massa grejer, att roboten ska kunna köra över högar med betong och armeringsjärn. Ett viktigt delproblem är att kunna ta sig fram, det som kallas traversability, men det är inte det problemet vi fokuserar på.
Robotar som används av brandmän måste också klara av rök och dålig sikt. Då kan navigering med sonar i stället för kameror eller laserskannrar vara ett alternativ. Andra instrument som robotar kan utrustas med är sensorer för att känna av infraröd strålning.
– Brandmän är intresserade av att veta var det är varmt. Tittar vi på industriscenarier, som vår forskning är inriktad på, kan det brinna nära oljecisterner i en hamn. Då är det bra att veta vilken cistern som är varmast och som måste prioriteras.
Petter Ögren har gått vidare till nästa steg i forskningsarbetet med räddningsroboten.
– Nu har vi skruvat på armar så att den kan undersöka saker. Om brandmännen misstänker att det läcker farlig klorgas till exempel, och behöver veta vilka områden som är säkra, kan roboten först åka omkring och topsa vattenpölar, eftersom klorgas löser sig i vatten.
Det måste vara spännande att till slut få se sina räddningsrobotar i skarpt läge?
– Det var en jordbävning i Italien för kanske tre år sedan. Då var några av våra partner där med robotarna, men tyvärr inte med våra algoritmer i. De åkte in i en kyrka för att avgöra om den höll på att rasa ihop eller inte, så projektets robotar har redan kommit till verklig nytta.
Daniel Strömbom forskar i matematisk biologi vid Uppsala universitet. Även han har skapat algoritmer som kan användas i räddningsrobotar, men för att utveckla dem användes något som är rätt långt från dataspelsvärlden: arbetande vallhundar.
I sin forskning har Daniel Strömbom intresserat sig för djur som rör sig i svärmar, flockar och stim. Med matematiska modeller beskriver han vilka regler som gäller för individerna i gruppen och vad som styr djurens förflyttningar.
En speciell fråga inom det temat är det som kallas för The shepherding problem: Hur kan en individ kontrollera ett stort antal motvilliga individer?
Om man betraktar en vallhund som jobbar ser det ut som att det räcker med snabbhet och ihärdighet för att flytta motsträviga får över ett fält. Men att teoretiskt beskriva hundens taktik har varit mer komplicerat.
En teoretisk modell bygger på att vallhunden sveper fram och tillbaka samtidigt som den knuffar fåren framåt – så som det också ser ut i verkligheten. Modellen fungerar, men bara om det är färre än fyrtio individer i den teoretiska flocken. Blir flocken större delar den lätt upp sig i mindre enheter och vallningen misslyckas. Verklighetens hundar kan valla över åttio får åt gången. De måste använda sig av en annan taktik.
Den hittade Daniel Strömbom tillsammans med en brittisk biolog. De började med att utrusta fyrtiosex får och en erfaren vallhund med små ryggsäckar som innehöll gps:er med hög precision. Därefter överförde de gps-informationen från det verkliga vallandet till en matematisk modell.
Vallhunden använder två enkla regler som den skiftar mellan: att samla flocken när den är utspridd och att driva den framåt när den är samlad. För att välja mellan att samla och driva, bedömer hundenhela tiden hur sammanhållen flocken är – kanske genom att med blicken konstant söka efter mellanrum i allt det ulliga den har framför sig.
Dessa insikter använde Daniel Strömbom för att konstruera en algoritm som inte enbart löste The shepherding problem. För enligt Daniel Strömbom och hans kolleger skulle den också kunna användas i olika slags räddningsrobotar, till exempel för att hjälpa till med att städa upp efter oljeläckage eller assistera vid evakuering av rökfyllda lokaler.
Världen behöver räddningsrobotar. Enligt Röda korset inträffade under 2000-talet över sju tusen katastrofer som tog drygt en miljon människoliv och orsakade ekonomiska skador för nästan tusen miljarder USA-dollar. Allt som kan bidra till att rädda liv, skona räddningspersonal och minimera ekonomiska skador borde ha högsta prioritet.
Läs mer
Vetenskapsåret 2026 – del 2: Humanoida robotar, månfärd och slow fashion
Webbredaktör Sara Peterssohn siar om det nya året.
Robotarna har djupa rötter i historien
Trots industrirobotar och robotgräsklippare är den första associationen till ordet ”robot” inte sällan en mekanisk människa – en maskin i människoform.

Här är roboten som härmar en klätterväxt
Den klätterväxtliknande roboten reagerar på ljus och tillverkar sig själv med hjälp av en 3d-skrivare. På sikt kan roboten användas för att utforska miljöer som är farliga för människan att vistas i.

Robot hoppar 100 gånger sin egen höjd
30 centimeter hög och 30 gram tung klarar roboten att hoppa drygt 30 meter upp i luften.

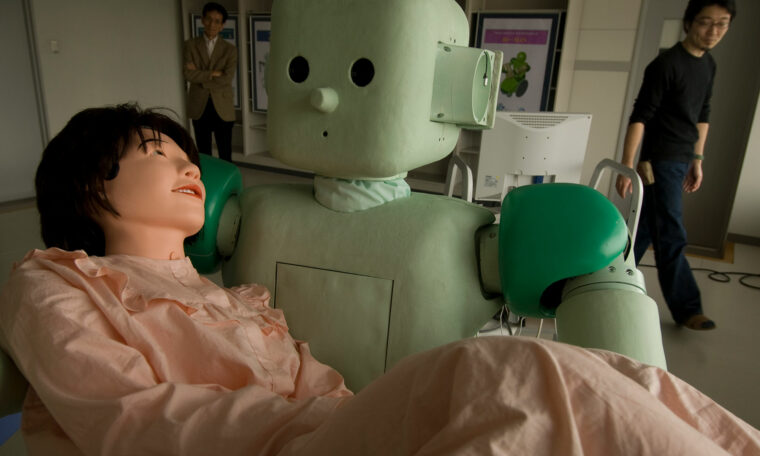
Robot opererar själv
I experiment på grisar har en robot fått sy ihop tarmar på egen hand. Ett viktigt steg mot mer automatiserad kirurgi i mjuk vävnad.