Roboten behöver hud
En robot har dålig känsel. Trots att det är enkelt att registrera tryck, finns det inga konstgjorda sinnesorgan med tillräckligt många sensorer.
Sinnet som vi i dagligt tal kallar känsel är egentligen minst fem. Ett för att känna värme, ett annat för kyla, ett tredje för tryck, ett fjärde för vibrationer och ett femte för beröring. Bortsett från beröring är de alla enkla att härma för en dator. En temperaturgivare eller en trycksensor kan känna temperatur respektive tryck betydligt noggrannare än en människa. Ändå är en robot i princip blind när det gäller känseln.
Det största problemet är att roboten bara har några få sensorer, medan en människa har flera miljoner. Huden är näst efter synen det sinne som ger mest information. Skälet är att det finns så många sensorer.
En industrirobot behöver bara en sensor för att veta att den är i kontakt med ett föremål. Industrimiljön är dessutom välkontrollerad, och bara vissa föremål är tillåtna i robotens arbetsområde. Men det finns många miljöer som inte är så välkontrollerade, t ex ett hem, ett kontor eller utomhusmiljön. Och där får en klumpig robot inte gå omkring och välta saker bara för att den inte märker att den går emot dem.
Infraljud som känselspröt
Robotforskarna på Chalmers tekniska högskola i Göteborg ska nu börja experimentera med att skicka infraljud från robotens händer. Ljudet kommer att studsa olika beroende på vilken del av handen som nuddar något. Möjligtvis kan man använda den informationen för att faktiskt låta roboten känna över hela kroppen.
Bristande känsel kan också delvis ersättas av andra sensorer, som ekolod och radar. De kan se föremål och undvika kontakt. Men i många fall krävs kontakt, t ex i en griparm eller i fotsulan på en robot med ben och fötter. I griparmen är det viktigt att greppet blir precis så hårt att föremålet inte glider, men ändå så löst att det inte krossas. Det kan tyckas enkelt att avgöra om sensorn bara registrerar tillräckligt noggrant. Men här spökar verkligheten igen genom störningar både från omgivningen och från roboten själv.
En robotarm som rör sig vibrerar, något som ger signaler till sensorn och som måste filtreras bort. Även omgivningen kan ge störningar genom t ex vibrationer, som kan vara mycket svåra att upptäcka och filtrera bort. Till viss del liknar problemet det som uppstår när en ljudinspelning från en bullrig miljö måste rensas från ovidkommande ljud för att hörselsinnet ska kunna tolka tal.
Problemet med dessa filter är att de skapar fördröjning. Det tar en stund att filtrera bort bruset. Utmaningen är att filtrera bättre och snabbare så att rätt data används av roboten.
Forskningen om artificiella sinnen Finansieras bl a av Stiftelsen för Strategisk Forskning, SSF, NUTEK, Teknikvetenskapliga Forskningsrådet, TFR och ett stort antal företag.
Läs mer

Upp till bevis för största kvantdatorn
Det amerikanska företaget IBM är först med en kvantdator med mer än 100 kvantbitar. Men svensk expert vill inte kalla det en milstolpe.
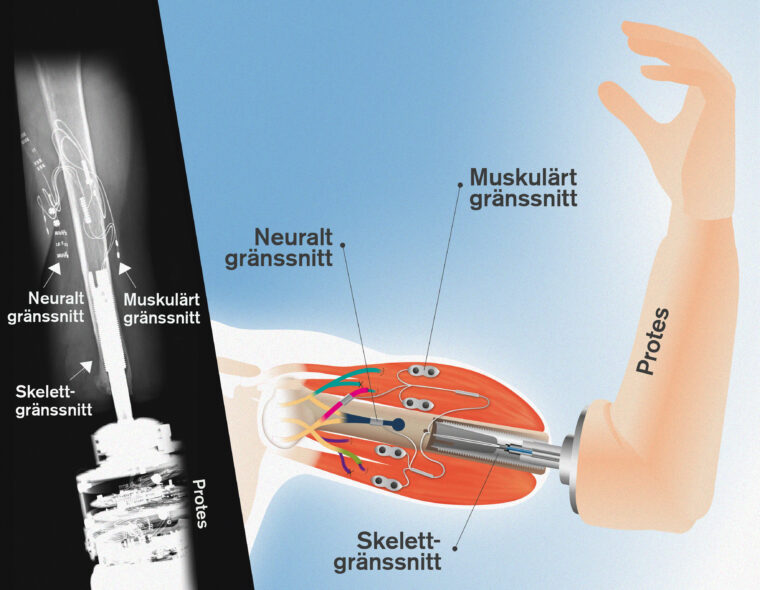
Protes med känsel förenklar vardagen
Tre svenskar är först i världen med att leva med en tankestyrd armprotes med inbyggd känsel. En ny studie visar att protesen förenklar vardagslivet.
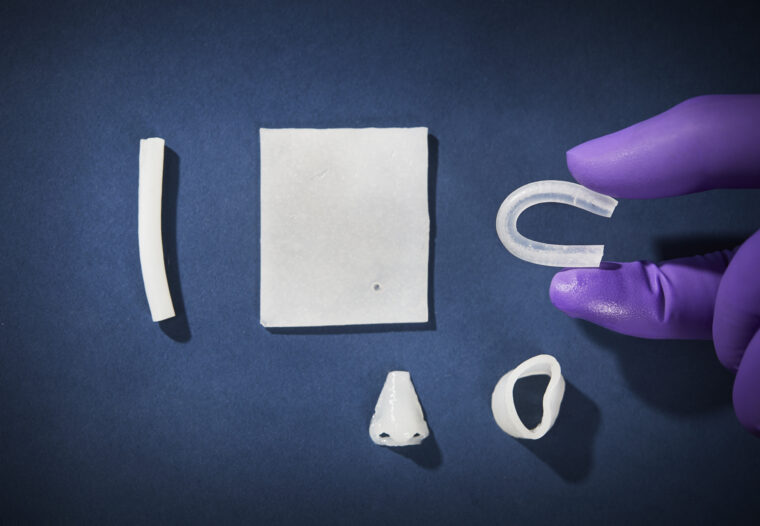
Nytt gummi kan ersätta brosk
Forskare på Chalmers har utvecklat ett nytt gummimaterial som kan ersätta brosk i kroppen. Första tillämpningen kan bli en urinkateter.

Första kommersiella kvantdatorn – eller?
Det amerikanska it-företaget IBM har presenterat vad de kallar ”världens första kommersiella kvantdator”. Men en svensk expert anser inte att framsteget är så stort.
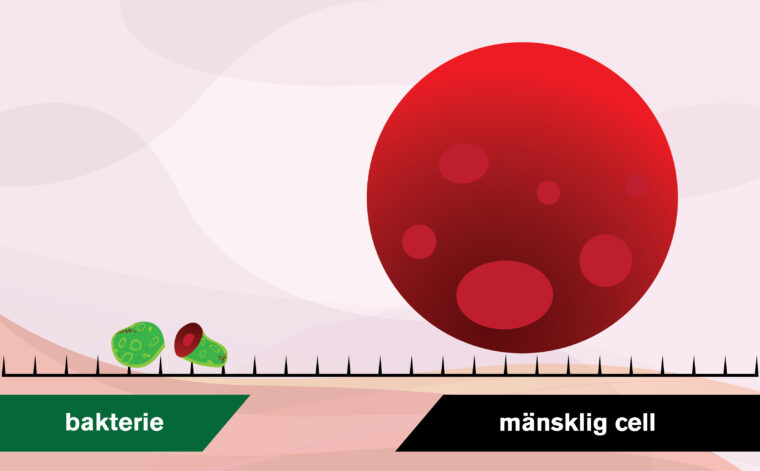
Liten spikmatta ska stoppa bakterier
En yta täckt med vassa flagor av grafen dödar bakterier som försöker få fäste. Upptäckten kan användas för att motverka infektioner vid implantat.