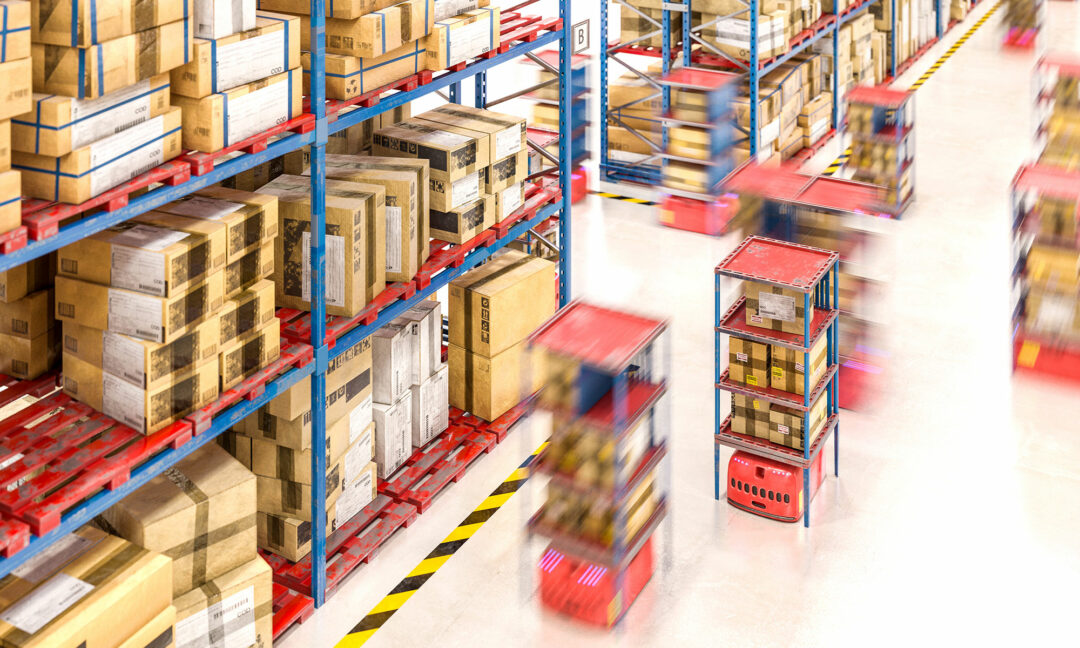
Självkörande robotar som jobbar sida vid sida med människor blir allt vanligare i industrin. Nästa steg är att få dem att förstå instruktioner och lösa problem på egen hand.
Bild: Getty images
Smarta truckar instruerar sig själva
En ny generation smarta robotar är på väg ut i industrin. En utmaning är att få dem att samarbeta med människor på ett säkert sätt. Robotforskare i Örebro utvecklar lösningar för såväl lager som gruvor.
Pallar med nyponsoppa, frasvåffelmix och stora hinkar med konserverade grönsaker fyller lagret hos Orkla Foods i Örebro. Då och då kommer en gaffeltruck för att hämta eller lämna varor. Men en av truckarna skiljer sig från mängden. Utan förare och utrustad med en mängd blinkande och snurrande instrument rör den sig långsamt längs en av gångarna. Råkar någon gå framför så stannar den.
– Säkerheten är central. Utan den går det inte att släppa loss en förarlös truck så här på ett lager, säger Martin Magnusson, forskare på Centrum för tillämpade autonoma sensorsystem, AASS, vid Örebro universitet.
Den självkörande trucken är en av tre i ett EU-finansierat forskningsprojekt med målet att utveckla en flotta av lagertruckar, som på egen hand kan hämta varor från hyllorna och samsas med bemannade truckar och människor som rör sig i lokalerna.
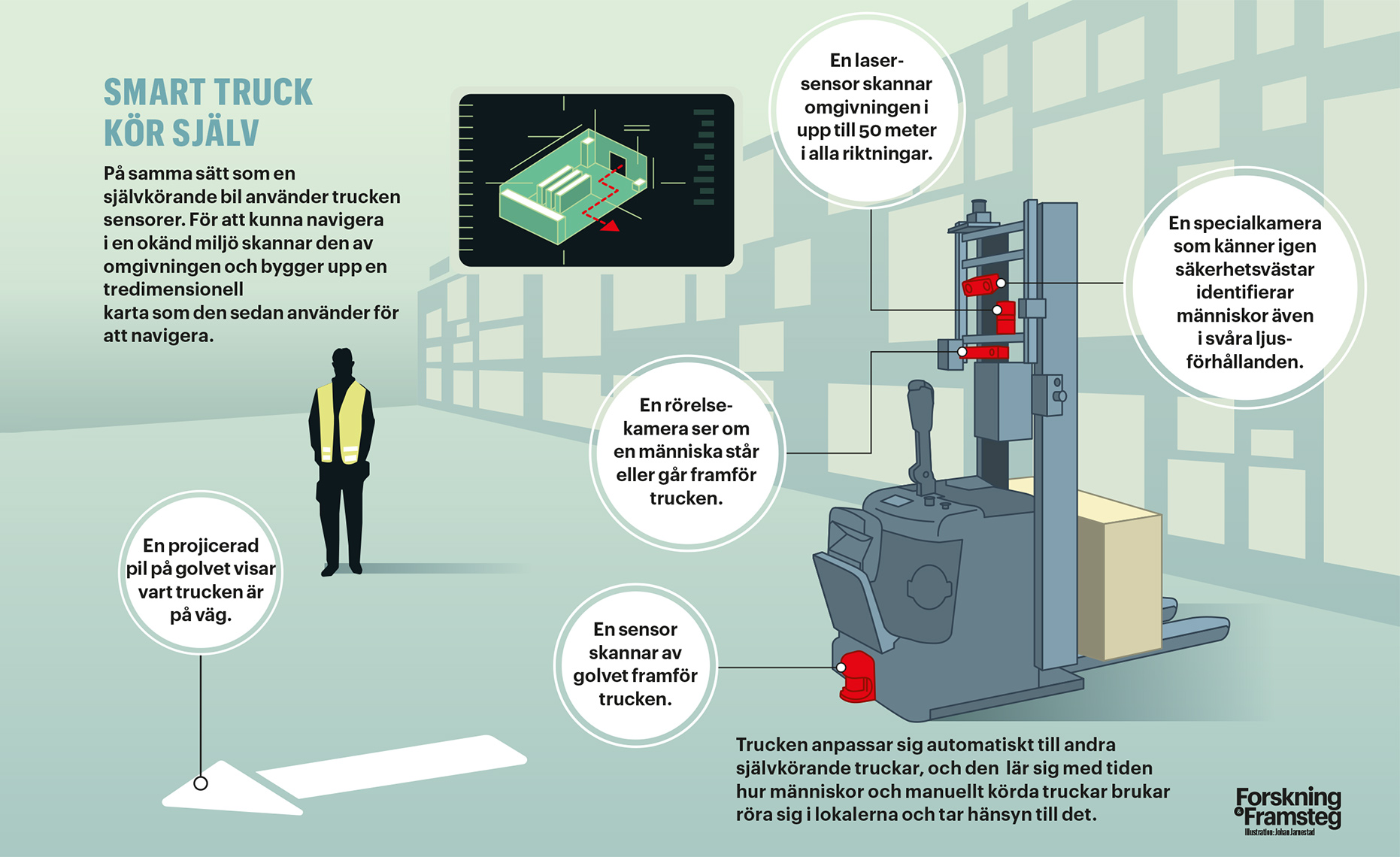
Smart truck kör själv
Truckar med extra sensorer
Förarlösa truckar rullar sedan länge på fabriksgolven på förprogrammerade rutter. Men trenden går mot mer självständiga robottruckar som kan anpassa sig till omgivningen. De behöver till exempel kunna avgöra om ett hinder på vägen är en människa eller något annat föremål. För att ge trucken bättre ”ögon” är forskningstrucken därför utrustad med flera extra sensorer.
Förutom den obligatoriska standardsensorn som skannar av golvet framför trucken, har den ytterligare tre sensorer som sitter ungefär i förarhöjd. En rörelsekamera, av samma typ som används i vissa dataspel, ser om en människa står eller går framför trucken. Bredvid sitter en laser som håller koll på upp till 50 meter i alla riktningar. Den sista sensorn är en specialkamera, utvecklad av ett spinn off-företag från Örebro universitet, som lärt sig känna igen säkerhetsvästar – obligatoriskt i många industriella miljöer.
– Kameran klarar även svåra ljusförhållanden som direkt solljus, och kan då upptäcka en person som kanske ligger avsvimmad på marken eller står på en stege, säger Martin Magnusson.
Ett annat mål i forskningsprojektet är att robotarna ska vara enkla att installera och använda, även i en ny, tidigare okänd, miljö. Det första truckarna då måste göra är att kartlägga sin nya arbetsplats. För detta har forskarna utvecklat nya metoder som gör att installationen kan göras på mindre än en timme.
Trucken ritar upp karta
Tillsammans med kollegan Chittaranjan Swaminathan demonstrerar Martin Magnusson de olika stegen. Först behöver robottrucken kalibrera sina sensorer, vilket den gör automatiskt genom att snurra några varv. Chittaranjan Swaminathan kör sedan långsamt genom lagret medan trucken automatiskt skannar gångar, lagerhyllor och väggar. Samtidigt kan Martin Magnusson följa hur en tredimensionell karta av lagret växer fram på hans datorskärm. När kartan är klar visar han ytterligare en finess, en metod som automatiskt letar efter ”brus” som inte hör till byggnadens struktur. Kanske gick en person förbi i gången under inskanningen och lämnade en skugga som inte ska vara med på kartan.
Nu är roboten klar för sitt första uppdrag. Martin Magnusson markerar på kartan vart den ska åka och trycker på start. Roboten ger sig lydigt iväg mot den markerade hyllan.
– Att installera en robot i en ny miljö kunde tidigare ta flera veckor, säger han.
Även två mindre självgående robotar ingår i projektet. När alla är igång samtidigt måste de hålla koll på varandra så de inte krockar. Även detta sker automatiskt.
– I stället för att manuellt tala om hur de ska köra planerar robotarna själva sina rutter och koordinerar om flera av dem exempelvis måste passera en trång passage.
Med tiden lär de sig även hur människor och manuellt körda truckar brukar röra sig i lokalerna och tar hänsyn till det.

Bild: Örebro Universitet
Trucken har fått ”händer”
I EU-projektet deltar även forskare vid universitetet i Pisa och det tekniska universitetet i München, som ansvarat för att ge trucken ”händer” som kan skära bort plastemballage runt lastpallarna och lyfta olika typer av varor. På grund av coronapandemin står dock robothänderna kvar i Pisa, så Martin Magnusson får visa en film över hur de lyfter lådor och hinkar.
– Det fungerar bra även om det går betydligt långsammare än för en människa.
Han ser ett stort behov av den här typen av flexibla och självgående mobila robotar som kan jobba tillsammans med människor på ett säkert sätt.
– Många nya stora lager är helt automatiserade från början. Men då måste du bygga lagret åt robotarna och det är en stor investering. För ett mindre företag är det inte möjligt och då passar det bättre med en robot som smälter in i den nuvarande miljön och fungerar tillsammans med den nuvarande personalen.
Antalet nya industrirobotar som installeras per år har trefaldigats på tio år, enligt statistik från den internationella robotfederationen. Under 2019 installerades 373 000 industrirobotar. Merparten är traditionella robotar som utför repetitiva uppgifter avskärmade från människor i gallerförsedda burar av säkerhetsskäl. Men trenden går även mot allt fler samarbetande robotar som kan jobba sida vid sida med människor. När de samarbetande robotarna dessutom blir rörliga, som de i Örebro, öppnar det för mer flexibla fabriker.
Precis som biltillverkarna arbetar industrin också med självkörande fordon. Här ligger gruvindustrin långt framme, berättar Federico Pecora, som leder labbet Multi-robot planning and control vid AASS.
– Det är mycket tal om självkörande bilar men det är i industriella miljöer som det händer saker för att öka produktiviteten och säkerheten – och just gruvor är farliga miljöer.
Lastare kör själva i gruva
I ett internationellt projekt arbetar han med att simulera 20 självkörande lastare i en guldgruva i Australien. Lastarnas uppgift är att hämta malm i labyrinten av gruvgångar och föra den till krossen. Utmaningen är att koordinera arbetet utan att maskinerna kolliderar eller hindrar varandra i arbetet.
Ett annat projekt går ut på att få de olika armarna på en borrigg att automatiskt anpassa sig till varandra. På varje arm sitter en borr som borrar hål i bergväggen efter en förutbestämd plan.
– Det kan låta som ett enkelt problem men mycket kan hända när maskinen sätter igång att borra. Berget har olika hårdhet så varje hål tar olika lång tid och har du upp till 100 hål så är det en utmaning att optimera så att armarna inte kommer i vägen för varandra, säger Federico Pecora.
Även i gruvmiljön är det ibland nödvändigt att självkörande maskiner samverkar med mänskligt styrda.
– Det är en än större utmaning. En maskin lyder när den får en order men en mänsklig förare kan ju bestämma sig för att strunta i ordern eller lösa uppgiften på ett annat sätt, säger Federico Pecora.
För att bli verkligt samarbetande kommer robotar därför att behöva en större flexibilitet och även programmeras på nya sätt. I stället för att programmeras att utföra vissa moment, som att skruva fast fyra skruvar, ska roboten förstå det underliggande problemet som den ska lösa.
– Kan vi få robotar att förstå instruktioner från människor och kan vi få robotar att lära andra robotar? Eller lära en människa? Det är nästa steg i vår forskning, säger Federico Pecora.

Kunskap baserad på vetenskap
Prenumerera på Forskning & Framsteg!
Inlogg på fof.se • Tidning • Arkiv med tidigare nummer
Läs mer

Självkörande lastbil tillåts på svensk väg
Nu trafikerar en eldriven lastbil utan förare en kort sträcka på allmän väg i Jönköping.
E-handelns returer skadar miljön
Svenska konsumenter skickar varje år tillbaka 3,3 miljoner varor som köpts på nätet. Störst andel återköp sker inom klädhandeln, där drygt var femte köp skickas…
Robotarna har djupa rötter i historien
Trots industrirobotar och robotgräsklippare är den första associationen till ordet ”robot” inte sällan en mekanisk människa – en maskin i människoform.

Här är roboten som härmar en klätterväxt
Den klätterväxtliknande roboten reagerar på ljus och tillverkar sig själv med hjälp av en 3d-skrivare. På sikt kan roboten användas för att utforska miljöer som är farliga för människan att vistas i.

Robot hoppar 100 gånger sin egen höjd
30 centimeter hög och 30 gram tung klarar roboten att hoppa drygt 30 meter upp i luften.